Drones para la detección de malas hierbas

Cursos de Especialista Universitario en aplicaciones de drones
18 enero, 2017
Feria de Lerma 2017
2 mayo, 2017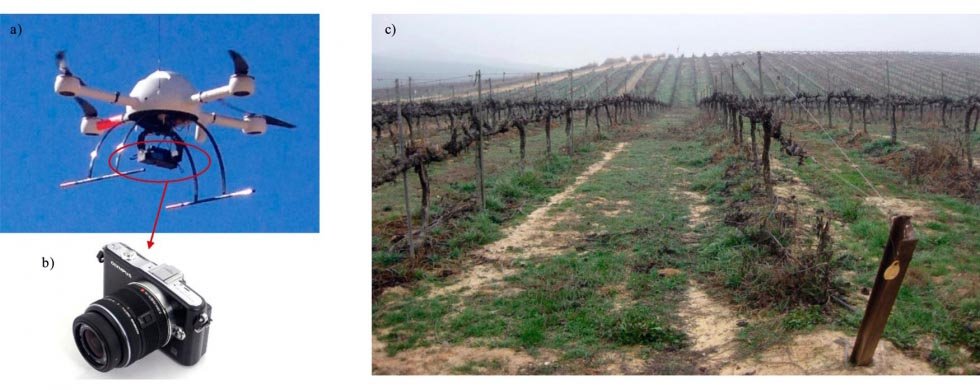
Investigadores del IAS-CSIC, con los que compartimos la «I Jornada de Viticultura de Precisión con Drones en Ribera del Duero«, publican el estudio «Uso de drones (UAV) para la detección de grama en cubiertas de viña», cuyos aspectos técnicos ya fueron presentados en las ponencias de la Jornada de Aranda de Duero. Una muestra más de las posibilidades de aplicación de los drones en la agricultura de precisión, sobre las que en Mendea Medio Ambiente estamos trabajando en su desarrollo e implementación.
Uso de drones (UAV) para la detección de grama en cubiertas de viña
Ana I. de Castro1, José Manuel Peña2, Jorge Torres-Sánchez1, Francisco M. Jiménez-Brenes1, Francisco Valencia3 y Francisca López-Granados1
1Instituto de Agricultura Sostenible (IAS-CSIC), Córdoba
2Instituto de Ciencias Agrarias (ICA-CSIC), Madrid
3Depto. Hortofruticultura, Botánica y Jardinería (ETSEA-Universitat de Lleida), Lleida.
El manejo adecuado de las cubiertas vegetales en viñedos permite equilibrar el vigor y rendimiento de la viña, resultando en una mejora de la calidad de la cosecha. Estas ventajas quedan mermadas con las infestaciones de grama (Cynodon dactylon), una mala hierba perenne difícilmente controlable. Por ello se analizaron imágenes obtenidas en viñedos con vehículos aéreos no tripulados (UAV), mediante técnicas basadas en objetos (OBIA) para determinar la posición de los rodales de grama. El algoritmo desarrollado permitió la clasificación automática de las cuatro clases (viña, suelo desnudo, grama y cubierta vegetal) y la generación de mapas de grama para su control localizado. Esta técnica de viticultura de precisión conlleva una disminución del coste económico y medioambiental del tratamiento.

Introducción
El empleo de grandes cantidades de insumos en la agricultura moderna, como por ejemplo riego o aplicación de agroquímicos, ha generado una preocupación social relativa al alto impacto económico y medioambiental de las actividades agrícolas, dando lugar a la creación de una política europea para promover el uso sostenible de productos fitosanitarios (Directiva 2009/128/CE y Reglamento (CE) 1107/2009), ya transpuesta a la normativa nacional (Real Decreto 1311/2012), donde se destaca «el fomento del bajo consumo (reducción de las aplicaciones) y la utilización de dosis adecuadas y ajustadas a la superficie a tratar». Este concepto se enmarca en el fundamento de viticultura de precisión (VP), que busca el manejo localizado del viñedo de acuerdo a la variabilidad espacio-temporal existente en la parcela, ajustándose las tareas y los tratamientos agrícolas a las necesidades reales de cada zona del cultivo. La aplicación de estas técnicas consigue la reducción de los costes, el aumento de la rentabilidad y la obtención de beneficios económicos y medioambientales. Para poder aplicar VP es necesario delimitar la posición en el campo de aquellos factores que inciden en el rendimiento del cultivo o zonas homogéneas donde realizar los tratamientos o tareas, así como el análisis de los datos que permitan planificar la toma de decisiones, respondiendo así a las preguntas dónde, qué, cuánto y cuándo aplicar. El uso de técnicas de teledetección y análisis de imágenes han demostrado ser una herramienta muy eficiente para monitorizar los cultivos (Peña et al., 2013). En especial, los Vehículos Aéreos No Tripulados (UAVs, por sus siglas en inglés) o drones están siendo muy utilizados en viticultura, gracias a la elevada resolución espacial de las imágenes obtenidas y la posibilidad de poder adquirirlas en momentos críticos del cultivo (Matese et al., 2015).
El sector vitivinícola está adoptando diferentes estrategias para una gestión más sostenible que permita disminuir costes y optimizar la calidad del producto, recomendando entre ellas el uso de cubiertas vegetales (Ramírez Pérez y Lasheras Ocaña, 2015). Entre otras ventajas, esta estrategia permite equilibrar el vigor y rendimiento de la viña, resultando en un aumento en la calidad de la cosecha (Sagüés Sarasa et al., 2013), así como proteger el suelo contra la erosión, mejorar su estructura y oxigenación y aumentar la materia orgánica. Además, han mostrado ser útiles para el control de algunas especies de malas hierbas, permitiendo una reducción del uso de herbicidas (Ramírez Pérez y Lasheras Ocaña, 2015). Si bien, en los últimos años se ha constatado el aumento progresivo de las poblaciones de la mala hierba Cynodon dactylon (L.) o grama, tanto en cubiertas naturales como sembradas en viñedos. Se trata de una mala hierba perenne muy competitiva, de difícil manejo por ser resistente a la siega y a ciertos herbicidas, y que se desarrolla por estolones rastreros y rizomas subterráneos. Además, al tratarse de una planta de verano incide en la disponibilidad de agua del suelo.
Por lo anterior, este trabajo consistió en el análisis de imágenes adquiridas por vehículos aéreos no tripulados (UAV) para detectar rodales de grama en viñedos con cubierta vegetal que permita diseñar de mapas de tratamiento localizado.
Material y métodos
Adquisición y análisis de las imágenes
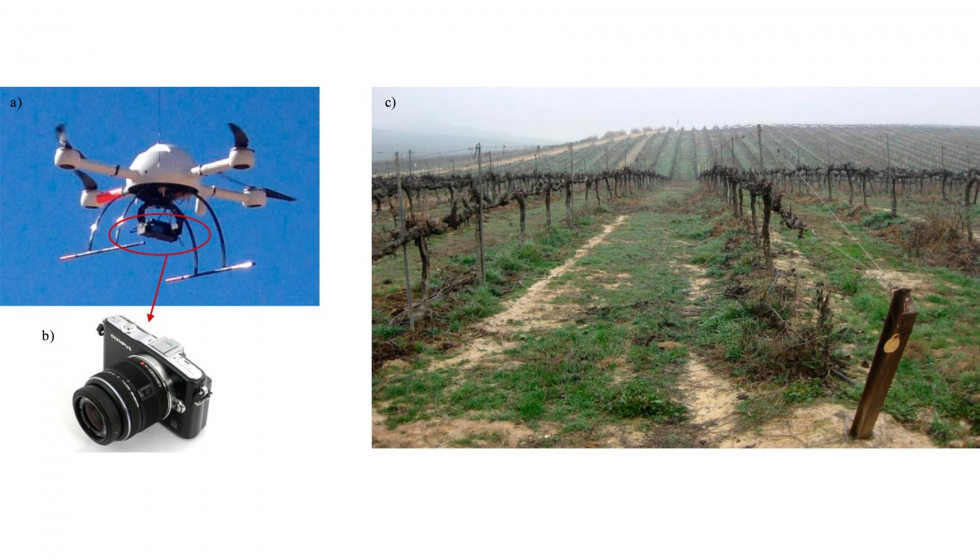
Las imágenes fueron tomadas en febrero de 2016 con un quadrotor md4-1000 volando a 30 m de altura, equipado con una cámara convencional de bajo coste y con un alto solapamiento entre imágenes (Figura 1 a y b). Esto resultó en imágenes compuestas por los 3 canales del visible (Azul, Verde y Rojo, AVR) y con 1 cm de resolución espacial. Los vuelos se realizaron en viñedos situados en Raimat (Lleida), variedad Pinot Noir, situados en espaldera con 3 m de distancia entre hileras y cobertura vegetal naturalmente instalada e infestada de grama (Figura 1c).
Como paso previo al análisis, las imágenes se ortomosaicaron y se generó el modelo digital de superficies (MDS), lo que permitió obtener una única imagen que representó toda la parcela y para la que se tenía información espacial y espectral de cada punto de la misma (Figura x). El análisis de esta imagen se llevó a cabo mediante técnicas basadas en objetos (algoritmos OBIA, de Object-Based Image Analysis), las cuales permiten resolver el problema de similitud espectral que existe entre la mala hierba y el suelo en el momento de la toma de imagen, coincidente con el momento más efectivo de tratamiento de grama: durante la parada vegetativa. Las técnicas OBIA son un método automático de clasificación de imágenes que permite incorporar en los algoritmos, además de la información espectral, información contextual de la parcela tales como la posición de la mala hierba con respecto a la línea de viña, el tamaño de las plantas, o parámetros de textura de los objetos presentes en la imagen (Peña-Barragán et al., 2013). Para este estudio, se desarrolló un algoritmo que genera mapas formados por los 4 usos principales que conforman la parcela (viña, cubierta vegetal, suelo desnudo y grama), siguiendo las siguientes fases:
- Fase 1. Segmentación de la imagen: consiste en formar objetos homogéneos que representen plantas individuales, utilizando información espacial y espectral.
- Fase 2. Clasificación de la viña: basada en la información espacial obtenida por el MDS generado, que permite reconocer cada una de las cepas de viña comparando alturas con el suelo circundante.
- Fase 3. Clasificación de la cubierta vegetal: en esta fase se utiliza la información espectral (AVR) para generar índices de vegetación, que son ratios entre las bandas que conforman la imagen y que permiten resaltar ciertas características de la vegetación. En este caso se seleccionó el Color Index of Vegetation (CIVE) (Kataoka et al., 2003), efectivo en resaltar la vegetación verde, ya que las plantas de la cubierta vegetal se encontraban emergiendo o recién emergidas en fase vegetativa.
- Fase 4. Clasificación de la grama: en este caso utilizamos el índice Excess Green minus Excess Red (ExGR) (Neto, 2014), seleccionado en estudios estadísticos previos por obtener altos valores de precisión en la separación grama-suelo desnudo.
- Fase 5. Clasificación del suelo desnudo: el resto de objetos remanentes en la imagen fueron clasificados como suelo.
Datos verdad-terreno para validar los resultados
Para determinar el porcentaje de acierto y de error del algoritmo de clasificación se tomaron datos verdad-terreno en campo el mismo día de la toma de la imagen. Para ello, se distribuyeron en el viñedo una serie de marcos de aluminio de 1×1 m de los que se tomaron las coordenadas GPS y el porcentaje de vegetación, correspondiente a cubierta y grama, presente en cada uno de ellos (Figura 2). Los marcos fueron clasificados en función del porcentaje de infestación y comparados con los datos verdad-terreno medidos en campo.

Resultados y discusión
El algoritmo desarrollado clasificó el 100% de las cepas de viña presentes en la parcela, poniendo de manifiesto la necesidad de incluir la información espacial del MDS, generado gracias al alto porcentaje de solape entre las imágenes. Una vez separada la viña, la cubierta fue correctamente discriminada y clasificada en todos los marcos verdad-terreno. Estos resultados muestran el buen funcionamiento del índice CIVE empleado en esta fase, consiguiendo detectar incluso las plantas de menor tamaño, circunstancia también debida al empleo de UAV para obtener imágenes de alta resolución espacial.
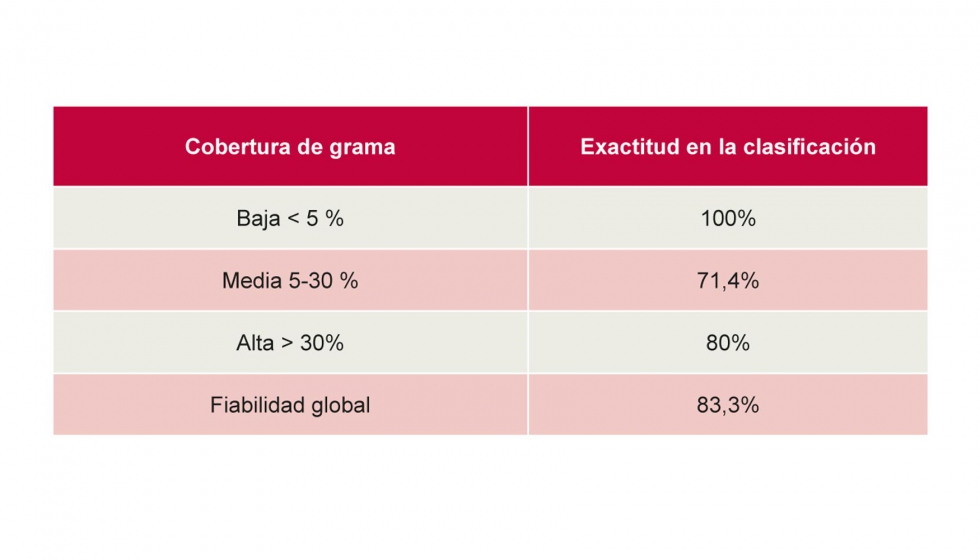
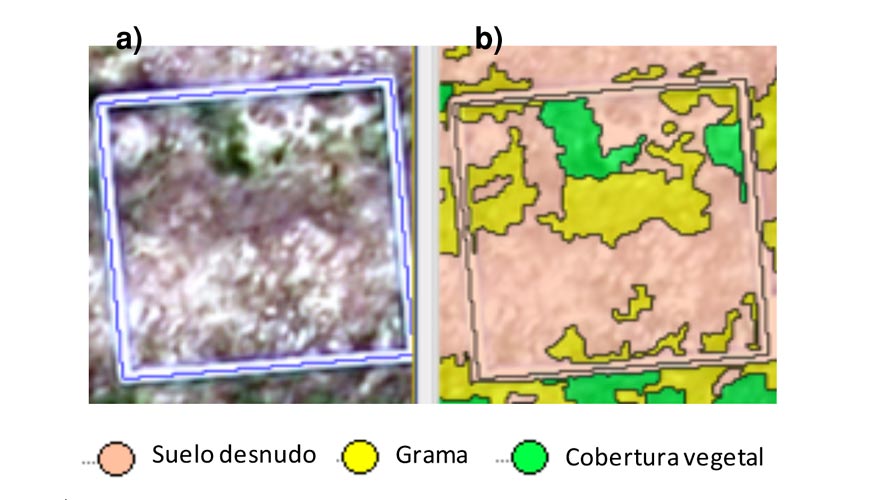
Los resultados de la clasificación de la grama se recogen en la Tabla 1, donde se muestra la exactitud en la clasificación de los marcos en función del porcentaje de infestación en cada uno de ellos, como sigue: Baja (grama < 5%); Media (grama = 5-30%); Alta (grama > 30%). El número de categorías consideradas y los umbrales indicados son totalmente configurables por el usuario y adaptables a los requerimientos o sistema de tratamiento que se utilice para el control de la mala hierba. Las figuras 3 a y b muestran el detalle de un cuadro verdad-terreno en la imagen mosaicada y después de la clasificación del algoritmo.
En la tabla se observa que la fiabilidad global de la clasificación del mapa es del 83,3%, variando los valores de exactitud en la clasificación en función de las categorías seleccionadas. Así, la detección de la grama fue más precisa para los casos en que la presencia de la misma en el marco fue baja o alta, con una exactitud igual o mayor del 80%. En los marcos en que la infestación se categorizó como media, su detección fue más complicada. La dificultad en la detección de la grama en esta categoría pudo deberse a que en los marcos seleccionados la grama presentaba un color más claro y una menor densidad, dejando entrever zonas de suelo debajo, por lo que la información espectral es una mezcla de ambos usos.
Estos primeros resultados muestran un considerable acierto en las clasificaciones de grama, teniendo en cuenta la situación de alta similitud de la grama y el suelo, indicando que las técnicas OBIA y las imágenes de alta resolución espacial, en este caso adquiridas con un UAV, son el camino para la detección de grama en este momento fenológico. Como mejora de estas clasificaciones se pretende ahondar en la metodología OBIA para incluir parámetros de textura en el algoritmo desarrollado, de manera que pueda mejorarse la separación grama-suelo en aquellos casos en que se presenta mezcla de información espectral de ambos usos. Como se extrae de estos resultados, el gran reto de este objetivo radica en separar de forma precisa la grama y el suelo en el momento de la toma de la imagen, ya que en la situación de parada vegetativa la grama tiene un comportamiento espectral muy similar al del suelo, y ambos con el mismo color. Sin embargo, se trata del momento idóneo para realizar los manejos efectivos en el control de la mala hierba, por lo que el mapa generado en este momento permitiría llevar a cabo el control localizado de la grama, disminuyendo el coste económico y medioambiental de su manejo. Además, si se cartografían los rodales de grama y se controlan durante 2-3 años agrícolas, se podría erradicar la mala hierba y favorecer el paso a producción ecológica, aumentando su valor añadido.
Cabe destacar que el algoritmo desarrollado es completamente automático y puede ser utilizado para la detección de grama en otros viñedos, obteniendo el mapa de clasificación de toda la parcela. Por otro lado, la metodología desarrollada en este trabajo genera información alfanumérica y tabulada de la parcela completa, donde pueden extraerse datos relativos a la viña, como por ejemplo posición, área y volumen de la cepa; número, tamaño y área de las plantas que han emergido en la cubierta vegetal; así como el porcentaje de suelo infestado por las malas hierbas.
Conclusiones
El análisis de imágenes-UAV de alta resolución espacial mediante técnicas basadas en objetos (OBIA) permitió el desarrollo de algoritmos para la detección de grama en cubiertas de viña, así como la creación de mapas de forma automatizada donde obtener parámetros morfológicos de la viña, situación de las cubiertas y posición de las infestaciones. Estos mapas ofrecen al agricultor una herramienta útil de apoyo en la toma de decisiones, como por ejemplo en el diseño de un plan de manejo localizado de las cubiertas, las siegas o el control localizado de la mala hierba durante la primavera, con la consiguiente reducción en el uso de herbicida, disminuyendo el coste económico y medioambiental del tratamiento.
Agradecimientos
Los autores agradecen a Raimat, S.A. el uso de sus parcelas para realizar los vuelos. Esta investigación fue financiada por el proyecto AGL2014-52465-C4-4R (Ministerio de Economía y Competitividad, fondos FEDER: Fondo Europeo de Desarrollo Regional). La investigación del Dr. Jorge Torres-Sánchez, Dr. Ana de Castro y el Dr. José M. Peña fue financiada por los programas FPI (BES-2012-052424), Juan de la Cierva (MINECO) y Ramón y Cajal (MINECO), respectivamente.
Referencias bibliográficas
- Kataoka, T.; Kaneko, T.; Okamoto, H.; Hata, S. (2003). Crop growth estimation system using machine vision. In: The 2003 IEEE/ASME International Conference on Advanced Intelligent Mechatronics. Proceedings, pp. b1079–b1083 vol.2.
- Matese, A.; Toscano, P.; Di Gennaro, S.F.; Genesio, L.; Vaccari, F.P.; Primicerio, J.; Belli, C.; Zaldei, A.; Bianconi, R.; Gioli, B. (2015). Intercomparison of UAV, aircraft and satellite remote sensing platforms for precision viticulture. Remote Sens. 7, 2971–2990.
- Neto, J.C. (2004). A combined statistical—soft computing approach for classification and mapping weed species in minimum tillage systems. University of Nebraska, Lincoln, NE.
- Peña, J.M.; Torres-Sánchez, J.; de Castro, A.I.; Kelly, M.; López-Granados, F. (2013). Weed Mapping in Early-Season Maize Fields Using Object-Based Analysis of Unmanned Aerial Vehicle (UAV) Images. PLoS ONE. 2013; 8: e77151.
- Ramírez Pérez, P.; Lasheras Ocaña, J.M. (2015). Guía de Cubiertas vegetales en vid. Consejería de Agricultura, Pesca y Desarrollo Rural Instituto de Investigación y Formación Agraria y Pesquera. Junta de Andalucía
- Sagüés Sarasa, A.; Aguirrezabal Bujanda, F.; Cibriáin Sabalza, F.; Caminero Lobera, L.; Suberviola Rípa, J. (2013). Gestión del suelo vitícola: cubiertas vegetales e incidencia en la calidad del mosto y vino. ACENOLOGÍA. http://www.acenologia.com/cienciaytecnologia/gestion_suelo_viticola_cienc0813.htm
Fuente: Interempresas.net



{kind=link}
{kind=link}